

Wszystko do morskiej nawigacji elektronicznej w jednym miejscu
Wszystko do morskiej nawigacji elektronicznej w jednym miejscu

Skończyliśmy kurs na sternika, zdaliśmy egzamin, nareszcie otrzymujemy upragniony patent. Mamy głowę pełną kursów kompasowych, magnetycznych, poprawek na dryf i pozycji zliczonych. Ruszamy w pierwszy samodzielny rejs wyczarterowanym jachtem. Jutro wypływamy, warto więc zapoznać się z urządzeniami na pokładzie. Trochę niepewni uruchamiamy chartplotter. Na ekranie pojawiają się COG, CTS, XTE. O co chodzi? Gdzie jest nasz kurs kompasowy? Zaraz sprawdzimy w podręczniku, ale… jest tylko po włosku. Dobrze, że nie przypomnieliśmy sobie o pomocach nawigacyjnych dopiero na pełnym morzu.
Jakim językiem mówi do nas nawigacja elektroniczna?
Zwykle jest to język angielski. Nie powinno więc być problemu, znamy przecież ten język. Niestety, jesteśmy zasypywani określeniami, które często potrafimy przetłumaczyć na język polski, ale których sens nie zawsze jest w pełni zrozumiały. 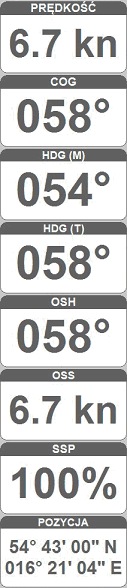
NavSim SailCruiser Fugawi Marine ENC
Przede wszystkim programy do nawigacji elektronicznej mówią do nas zazwyczaj językiem RZECZYWISTYM (T). Tak więc nasza pozycja pokazywana na ekranie to nasze rzeczywiste współrzędne geograficzne. Droga, którą aktualnie płyniemy to Kdd=COG wyznaczone przez GPS. Droga, którą planujemy płynąć to kierunek rzeczywisty łączący dwa waypointy – czyli planowany Kdd = (COURSE, CTS), odnoszą się one do północy geograficznej, czyli południka łączącego oba bieguny. Namiar na punkt to namiar rzeczywisty wyznaczony przez system. Zwykle systemy pozwalają także na wyświetlanie kierunków magnetycznych (M). Informacje wyświetlane przez programy lub chartplottery, można podzielić na kilka grup.
Dane z urządzeń pomiarowych
Do naszego systemu zawsze jest podłączony GPS. Gdy pozycja jest ustalona, urządzenie sygnalizuje to, wyświetlając komunikat „GPS FIX”. Jeśli GPS nie był używany przez jakiś czas, ustalenie pozycji może potrwać do kilkunastu minut. Nie denerwujmy się, trzeba odczekać. GPS może stracić pozycję, na przykład ze względu na problemy z anteną, zakłócenia - zwykle na skutek problemu z odbiorem sygnału. Wyświetli wtedy „NO FIX” lub „LOST SATELITE RECEPTION”. GPS określa naszą pozycję geograficzną. Podaje szerokość (LAT) i długość (LON). Często nie pokazuje objaśnień, co jest co. Tak więc tam, gdzie widzimy N (lub S), to szerokość geograficzna; tam, gdzie jest E (lub W), to
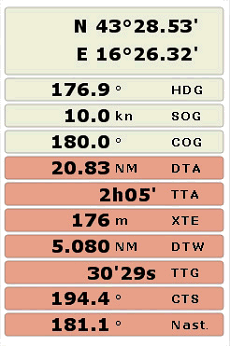
długość. Zwykle też szerokość jest wyświetlana za pomocą dwóch cyfr na początku (bo od 0° do 90°), a długość - trzech (bo od 0° do 180°). Warto zwrócić uwagę, czy system po minutach wyświetla ich dziesiętne i setne, czy też sekundy kątowe. GPS analizując zmianę pozycji, potrafi wyliczyć kąt drogi nad dnem (COG, CMG, CRS, TRK) i prędkość w odniesieniu do dna (SOG, SPEED, SPD, VEL), zwykle wyrażoną w węzłach (KT). 
Tiki Navionics NacSim SailCruiser
Jeśli posiadamy inne urządzenia zewnętrzne, to ich dane będą wyświetlane. Log będzie dostarczał nam informacji o prędkości względem wody (LOG, SWT), żyrokompas dostarczy kierunku wskazywanego przez diametralną statku (HDG, STEERING), echosonda będzie pokazywała głębokość (DEPTH). Zwróćmy uwagę na to, że COG i HDG będą się zwykle różniły. Pokrywają się, gdy całkowity znos jest równy zero. Gdy w systemie pracuje wiatromierz, to dodatkowo uzyskamy: kierunek (TWD), kąt padania (TWA) oraz prędkość (TWS) wiatru rzeczywistego i pozornego (AWD, AWA, AWS).
Dane dotyczące kursora
Umieszczając kursor (myszkę w programie lub wskaźnik na chartplotterze) w dowolnym miejscu na mapie, odczytamy jego pozycję geograficzną, a także namiar od naszego statku (BRG) i odległość do tego punktu (RNG).
Dane dotyczące trasy - marszruty
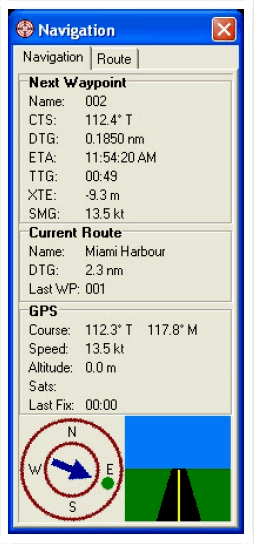
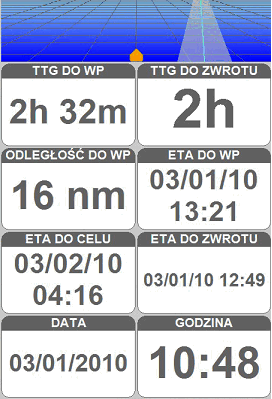
W programie możemy utworzyć i uaktywnić trasę (ROUTE), trasa składa się z punktów (WAYPOINT). System wylicza na bieżąco dane niezbędne do prowadzenia żeglugi po planowanej trasie. Uzyskamy planowany Kdd do kolejnego punktu trasy (COURSE, CTS) i namiar na ten punkt (BTW), odległość do kolejnego punktu (DTW) i do końca trasy (DTA, DTG), szacowany czas dojścia do kolejnego punktu (TTW, TTG) i do końca trasy (TTA, TTTG). Bardzo ważna informacja to oddalenie pozycji statku od linii planowanej drogi (COURSE, CTS) – tak zwany błąd poprzeczny (XTE, XTR). Jeśli wielkość XTE jest równa lub bliska zero, to znajdujemy się na planowanej drodze. Najlepiej jeśli nasz kąt drogi nad dnem (COG) pokrywa się z planowanym kursem do kolejnego punktu (CTS, BTW). Jeśli nasz znos jest istotny (silny prąd poprzeczny lub dryf spowodowany wiatrem lub falą), to powinniśmy mu przeciwdziałać. Najlepiej utrzymywać taki kierunek diametralnej statku (HDG), aby COG pokrywał się z CTS.
MaxSea TimeZero
W praktyce
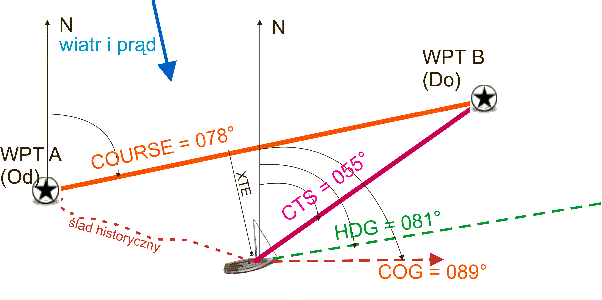
Płyniemy z punktu A do punktu B. Nasz system zaleca nam utrzymywanie kursu 078°. Sternikowi podajemy kurs 080° (zakładamy, że deklinacja i dewiacja jest równa zero). Po pewnym czasie okazuje się, że zaszliśmy z planowanego kursu o 3.5 Nm (XTE). Musimy poprawić nasz kurs (Rys.6).
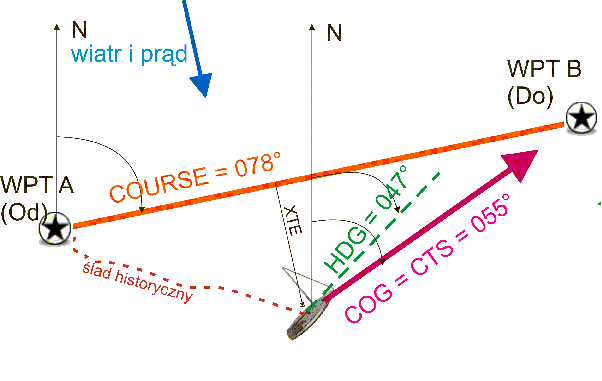
System pokazuje kierunek do waypointa B 055°. Na szczęście możemy wyostrzyć tak aby CTS = COG = 055° (Rys. 7). Widzimy, że należy utrzymywać kurs 047° (HDG), wtedy nasz kąt drogi nad dnem (COG) jest równy 055° i prowadzi nas do punktu B.
Dane dotyczące prognozy pogody
Jeśli nasz system potrafi zobrazować dane pochodzące z pobranej prognozy pogody (GRIB), to możemy obserwować je w różnoraki sposób. Najczęściej interesuje nas prędkość i kierunek wiatru (WIND), ciśnienie atmosferyczne (PRESS), temperatura (TEMP), opady (PREC).
Dane te mogą być wyświetlane za pomocą symboli (np. „piórek” określających siłę i kierunek wiatru), izolinii (na przykład izobar dla ciśnienia), kolorów na mapie (np. niebieski tam, gdzie występuje opad) lub tabelki wyświetlającej dane dla konkretnego miejsca.
Kwestia posługiwania się prognozą elektroniczną w systemach nawigacyjnych zostanie omówiona w jednym z kolejnych odcinków.
"Piórko" symbolizujące wiatr wiejący z kierunku wschodniego o prędkości 25 węzłów (kn)
Pływy
Większość systemów nawigacji elektronicznej zawiera dane dotyczące pływów (TIDES). Będziemy widzieli, kiedy mamy wysoką wodę (HW) i niską (LW); czy mamy do czynienia z pływem kwadraturowym (Np), syzygijnym (Sp); czy mamy pełnię księżyca (FULL), czy też nów (NEW).
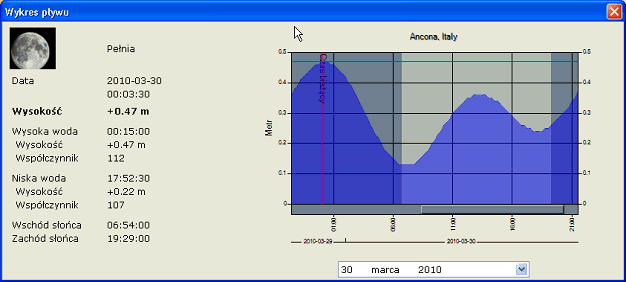
Pływy - MaxSea TimeZero
Obiekty
Nasz system nawigacji może być połączony z urządzeniem radarowym umożliwiającym automatyczne wykonywanie nakresu (ARPA), a także z odbiornikiem systemu automatycznej identyfikacji statków (AIS). Wtedy system będzie automatycznie wyróżniał obiekty niebezpieczne, najmniejszą odległość mijania lub odległość największego zbliżenia (CPA) i czas wystąpienia tej odległości (TCPA). Będziemy także informowani o odległości do obiektu (RNG, RANGE) i wielkości namiaru na drugą jednostkę (BRG, BEARING). Mam nadzieję, że temat systemów zapobiegających kolizjom uda się rozwinąć w jednym z kolejnych artykułów.
Po takiej powtórce jesteśmy lepiej przygotowani do roli nawigatora. Nie zaskoczy nas też brak podręcznika, może nas tylko ewentualnie mile zdziwić podręcznik po polsku.
Bardzo dziękuję panu Komandorowi Franciszkowi Wróblowi (autorowi Vademecum Nawigatora) za życzliwe konsultacje merytoryczne.
Artykuł opublikowany w magazynie Jachting 5/2010
(3733) (3)
 Whatsapp
Whatsapp