

Wszystko do morskiej nawigacji elektronicznej w jednym miejscu
Wszystko do morskiej nawigacji elektronicznej w jednym miejscu


Chmura TZ
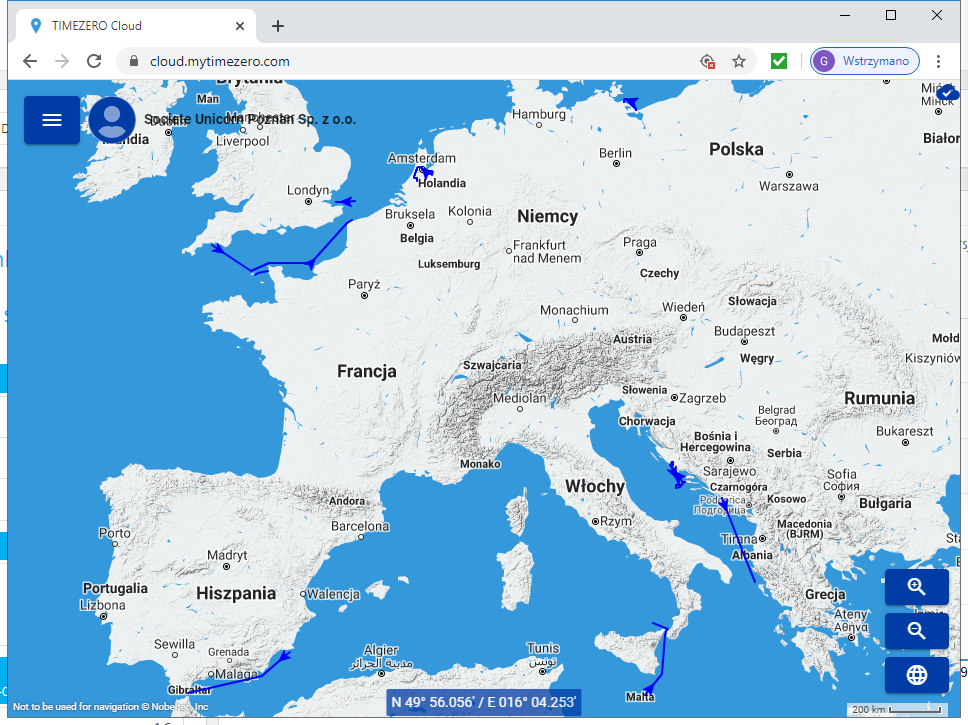
Dzięki chmurze TZ możliwa jest wizualizacja wszystkich obiektów użytkownika w zwykłej przeglądarce.
Możliwe jest także wyświetlanie własnej pozycji. Może to być wykorzystane na przykład do przekazywania swojej bieżącej pozycji rodzinie czy przyjaciołom.
Chmura umożliwia synchronizację danych między różnymi urządzeniami TZ i automatycznie archiwizuje nasze dane.
Dostęp do chmury z przeglądarki pod adresem: https://cloud.mytimezero.com/
Połowy i zdjęcia użytkownika
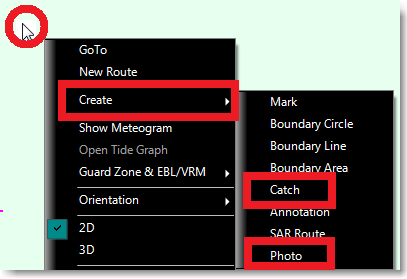
TZ Navigator v4.1 wprowadza dwa nowe typy obiektów użytkownika. Są one dedykowane zwłaszcza dla żeglarzy turystycznych i wędkarzy: Połowy i Zdjęcia. Te dwa nowe typy obiektów mogą zostać utworzone na mapie po kliknięciu prawym przyciskiem myszy.
Podobnie jak inne obiekty użytkownika (np. znaczniki, trasy) są one w pełni synchronizowane z innymi urządzeniami TimeZero lokalnie lub za pośrednictwem chmury. Mogą one być przeglądane w domu przy pomocy przeglądarki internetowej.
Połowy i zdjęcia są początkiem nowej serii obiektów które zostaną wprowadzone w przyszłości.
Połowy
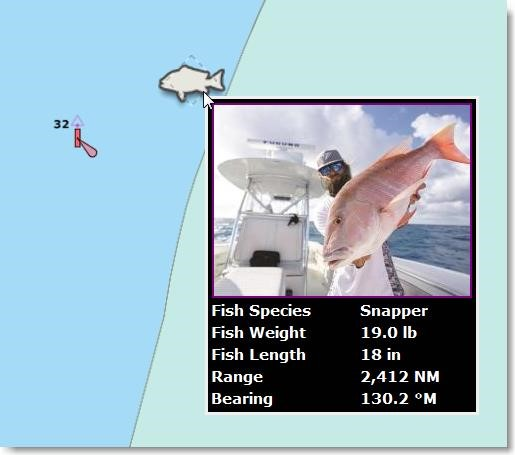
Połowy to znaczniki pozwalające na wprowadzanie dodatkowych informacji przydatnych w wędkarstwu sportowym:
• Gatunek ryby
• Długość ryby
• Waga ryby
• Nazwa i komentarz
• Głębokość
• Ciśnienie
• Temperatura powierzchni morza
Ikona znacznika jest wybierana automatycznie na podstawie gatunku ryby. Kolor ikony odnosi się do wagi ryby i jest przypisywany automatycznie według gatunku (zielony dla wagi ponadprzeciętnej, a czerwony dla niższej niż średnia z wprowadzonych przez ciebie ryb):

Dodatkowy filtr pozwala na wyświetlanie tylko ryb spełniających wybrane kryteria (gatunek, długość, waga). Bardzo łatwo można na przykład wyświetlić tylko ryby określonego gatunku o wadze większej niż średnia:

Ponieważ połowy są synchronizowane jak inne obiekty, możliwe jest na przykład dodanie zdjęcia w TZ Navigator na komputerze, iBoat na iPadzie lub TZ First Mate na iPhonie:
Zdjęcia
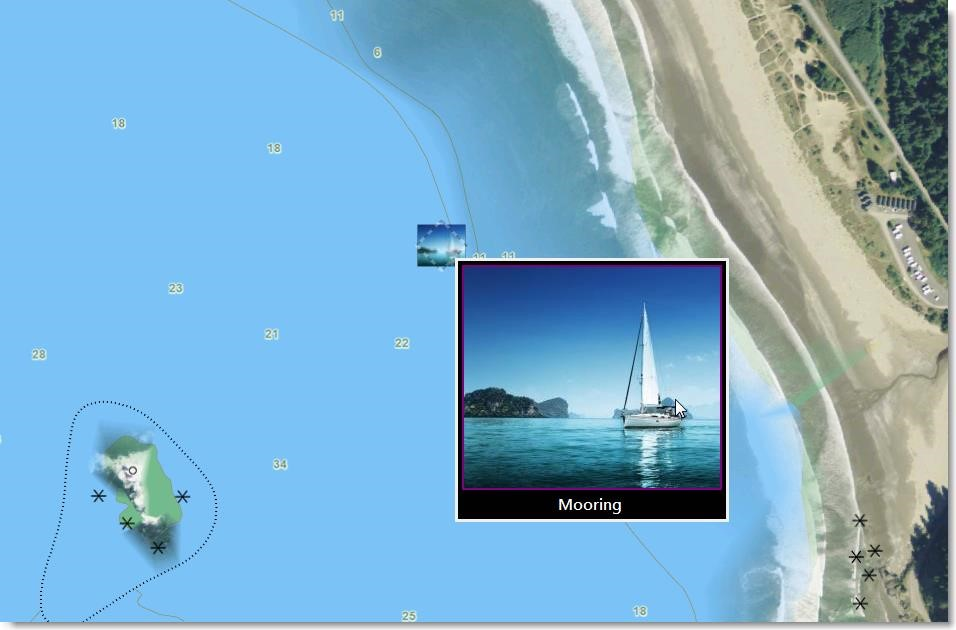
Zamiast używać Znacznika do uwiecznienia ładnej plaży lub kotwicowiska można użyć obiektu typu Zdjęcie. Zdjęcie jest wyświetlane na mapie jako miniaturka lub w pełnej wielkości po kliknięciu na ikonie.
Zdjęcia mogą być dodawane ręcznie po naciśnięciu prawego przycisku myszy w określonym miejscu na mapie. Możliwy jest też import zdjęć w formacie JPEG przy użyciu kreatora importu. Zdjęcia które posiadają tzw. geo-tagi zostaną umieszczone w miejscu odpowiadającym współrzędnym, a posiadające znacznik czasu w miejscu odpowiadającym historycznej pozycji zapisanej w śladzie.
Uwaga: Aby wykonać zdjęcie telefonem komórkowym zostanie udostępniona przez Furuno darmowa aplikacja (dla iOS i Androida) “TZ First Mate”. Będzie ona dedykowana dla wyświetlaczy NavNet TZT2 i TZT3, ale tak samo będzie mogła być używana z TZ Navigator. Głównym celem aplikacji będzie umożliwienie szybkiego uwiecznienia połowu lub widoku. Dzięki synchronizacji danych użytkownika przez chmurę będą one dostępne na wszystkich urządzeniach z rodziny TimeZero.
Zarządzanie trasami
Możliwe jest włączanie lub wyłączanie wyświetlania trasy na mapie. Trasę zaznacza się lub odznacza w tabeli z trasami.
Opcja ta jest bardzo przydatna gdy pracujemy z wieloma trasami i nie chcemy zaciemniać widoku na mapie.
NavNet TZT3 i synchronizacja z TZT2
TZ Navigator V4.1 może synchronizować wszystkie dane użytkownika z najnowszym sprzętem Furuno NavNet tak jak TZT3 i TZT2 V7.
Dowolne znaczniki, trasy, zdjęcia, obszary graniczne, połowy utworzone w TZ Navigator będą natychmiast przetransferowane do chartplotera przez sieć WiFi. Oczywiście transfer działa w obu kierunkach!
Jeśli komputer z TZ Navigator nie jest połączony z siecią WiFi plotera (na przykład gdy laptop został w domu), synchronizacja może zostać wykonana przez chmurę jeśli ploter zostanie podłączony do Internetu (na przykład używając telefonu komórkowego jako Hot Spot).
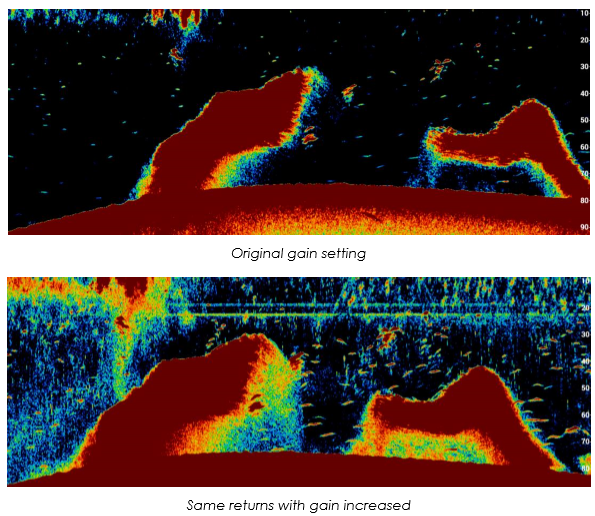
Przetwarzanie danych uzyskanych z echosondy Furuno
TZ Navigator V4.1 jest zgodny z ostatnim oprogramowaniem echosond Furuno Black Box (DFF1, DFF1-UHD, DFF3 i BBDS1). Pozwala to na kontrole wzmocnienia przetwarzania końcowego. Ta nowa funkcja umożliwia regulacje wzmocnienia poprzednich ech, pozwala na ciągłą obserwację jak zmiana wzmocnienia wpływa na echa wyświetlane obecnie na ekranie. Nie jest już potrzebne czekanie na wyniki zmian.
Usprawnienia NMEA2000 Actisense NGT-1 USB
TZ Navigator V4.1 jest w pełni zgodny z Actisense NGT-1 USB ustawionym na wyższą prędkość przesyłania danych (230,400 bps). Od czasu gdy domyślna prędkośc NGT-1 (115,200 bps) wynosi około połowę prędkości szyny NMEA 2000 (250 kbps), może to powodować pewne problemu w dużych sieciach NMEA 2000 (utracone PGNs). Teraz użytkownicy mogą zmienić prędkość NGT-1 USB i podwyższyć ją używając narzędzia Actisense NMEA Reader. TZ Navigator V4.1 jest teraz zgodny z obiema prędkościami i automatycznie je skonfiguruje.
Co więcej, podczas konfiguracji połączenia NMEA 2000 (używając Asystenta połączeń), monitor portu będzie wyświetlał zdekodowane numery PGN i odpowiadający im opis (a nie dane w postaci binarnej jak w poprzedniej wersji):
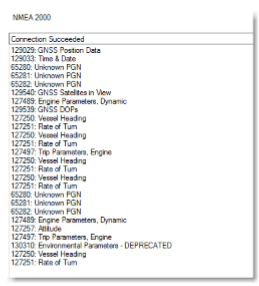
To powinno znacznie pomóc w konfiguracji i dawać pewność, że PGN są poprawnie odbierane przez TIMEZERO.
Uwaga: Wyświetlanie PGN jest także dostępne w Monitorze portu Asystenta.
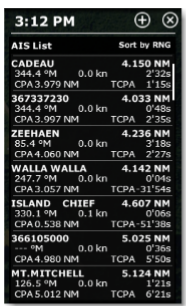
Nowa okno danych nawigacyjnych AIS/ARPA
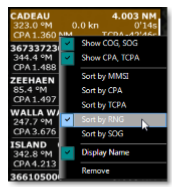
W TZ Navigator v4.1 znacznie poprawiono okno z danymi AIS i ARPA. Każdy wiersz wyświetla więcej informacji (nazwę lub MMSI, odległość, namiar, prędkość, czas ostatniej transmisji, CPA i TCPA) i możliwe jest przewijanie tabeli:
Można kliknąć na oknie wskazując konkretny obiekt. Zostanie on wyświetlony na środku mapy:
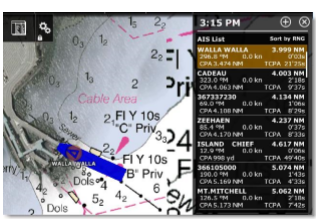
Jeśli klikniesz na obiekcie na mapie to zostanie on automatycznie wyświetlony w oknie nawigacyjnym.
Podobnie jak dla danych nawigacyjnych aktywnej trasy (od wersji 4.0), nowe okno ARPA i AIS automatycznie dostosowuje swoją wielkość do wolnego miejsca w pasku danych nawigacyjnych.
Uwaga: Po odblokowaniu okna z danymi nawigacyjnymi można zmieniać jego rozmiar
Po kliknięciu prawym przyciskiem myszy na oknie nawigacyjnym można zmienić sortowanie listy, a także wybrać jakie parametry mają być wyświetlane:
Zgodność z nowymi radarami Furuno: DRS12-NXT i DRS25A-NXT
TZ Navigator v4.1 jest zgodny z najnowszymi antenami radarowymi Furuno DRS12A-NXT, DRS25A-NXT i FAR2xx8.
Uwaga: Radar FAR2xx8 podobnie jak FAR3xxx wymaga aby komputer miał ustawiony adres w sieci 192.168.31.x. Radary FAR2xx8 i FAR3xxx nie mogą pracować jednocześnie w tej samej sieci, nie mogą też być we wspólnej sieci z innymi urządzeniami Furuno (na przykład z echosondą DFF).
Kompensacja falowania dla echosondy
Dzięki nowemu wykrywaniu Automatic NavNet Output, TZ Navigator V4.1 (gdy połączony z SC30/SC33) może wysyłać informacje o falowaniu do echosond DFF/BBDS1 w celu kompensacji falowania. Oznacza to, że kompensacja falowania dla echosond pracujących w sieci może się odbywać bez wyświetlacza MFD.
Wyjście NMEA0183 dla prędkości i temperatury powierzchni morza
Asystent połączeń w TZ Navigator v4.1 pozwala na skonfigurowanie wyjścia z prędkością (STW) i temperaturą powierzchni morza (SST). Może być to przydatne gdy otrzymujemy dane SST i STW od echosondy połączonej w sieci, a chcemy je przekazać do repetytora NMEA 0183.
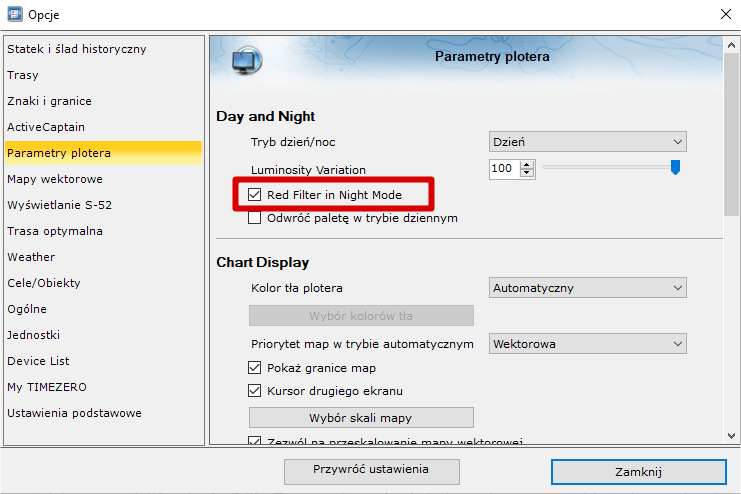
Tryb nocny
Użytkownik może ustawić intensywność jasności ekranu przy pomocy suwaka znajdującego się pod przyciskiem Tryb na pasku.
Możliwe jest także ustawienie czerwonego filtra w opcjach chartplotera:
Wysyłanie danych w trybie samodzielnym
W sytuacji gdy czujniki NavNet takie jak radary DRS, echosondy DFF są podłączone bezpośrednio do TZ Navigator (bez wyświetlacza MFD), TIMEZERO powinien wysyłać otrzymane dane do sieci. Poprzednio można było to uzyskać przez zaznaczenie kratki na ostatniej stronie Asystenta Połączeń. W złożonych instalacjach (gdy kilka komputerów jest zainstalowanych w tej samej sieci), należało upewnić się, że tylko jeden z nich wysyła dane do sieci. Podobne błędy mogły występować gdy TZ Navigator został skonfigurowany w momencie gdy wyświetlacz MFD nie był włączony w tym czasie (w taki przypadku może się zdarzyć że zarówno komputer jak i MFD będą wysyłać dane do sieci).
TZ Navigator v4.1 potrafi rozpoznać tryb pojedynczy (gdy w sieci nie ma wyświetlacza MFD ani innego programu TZ) i automatycznie ustawić wysyłanie danych do sieci. TZ Navigator automatycznie włączy wysyłanie danych z czujników do sieci NavNet i upewni się że tylko jeden komputer wysyła dane przy braku wyświetlacza MFD w sieci.
Nowy dynamiczny tryb potrafi aktywować wyjście danych gdy wyświetlacz MFD przestanie działać (na przykład zostanie wyłączony), a gdy wyświetlacz powróci w sieci wyłączy wyjście.
Uwaga: Gdy kilka programów TZ Navigator pracuje w tej samej sieci, ten który ma najniższy adres IP będzie wysyłał dane.
Podobnie, TZ Navigator v4.1 może teraz ustalić automatycznie priorytet nadawania dla echosond serii DFF i DFF3D. Gdy DFF3D i jednowiązkowa echosonda DFF pracują w tej samej sieci, dane o głębokości będą pobierane z jednowiązkowej echosondy.
Inne nowe funkcje w pozostałych artykułach poniżej
(1200) (3)
 Whatsapp
WhatsappProdukty powiązane
-
TimeZero Navigator Upgrade do wersji 5.0
Najbardziej intuicyjny program do nawigacji morskiej po polsku


